|
| | cQuaternionf () noexcept |
| |
| | cQuaternionf (DVALUE_t _x, DVALUE_t _y, DVALUE_t _z, DVALUE_t _w) |
| |
| | cQuaternionf (const SUPER_t &q) |
| |
| | cQuaternionf (const cMatrix4x4f &rm) |
| |
| | cQuaternionf (const cVector3f &vAxis, RADIANf_t fAngle) |
| |
| THIS_t | GetMulQ (const THIS_t &q) const |
| |
| THIS_t | operator* (const THIS_t &q) const |
| |
| RADIANf_t | get_EulerY () const |
| |
| cVector3f | get_EulerV () const |
| |
| void | InitIdentity () |
| |
| void | InitSlerp (const THIS_t &q1, const THIS_t &q2, DVALUE_t t) |
| |
| void | InitRotationAxis (const cVector3f &vNorm, RADIANf_t fAngle) |
| |
| void | InitAngle (const cVector3f &v, RADIANf_t fAngle) |
| |
| void | InitMulQ (const THIS_t &q1, const THIS_t &q2) |
| |
| void | InitRotationMatrix (const cMatrix4x4f &rm) |
| |
| void | InitEulerV (const cVector3f &v) |
| |
| void | AlignToNormal (cVector3f &vNorm) |
| |
| void | SetToAngleBetween (const cVector3f &v1, const cVector3f &v2) |
| |
| void | SetEulerY (RADIANf_t fAngleY, bool bMoveNormalized) |
| |
| | UNITTEST_FRIEND (cQuaternion) |
| |
| | cQuaternionT () noexcept |
| |
| | cQuaternionT (float _x, float _y, float _z, float _w) noexcept |
| |
| | cQuaternionT (const SUPER_t &q) noexcept |
| |
| bool | isIdentity () const noexcept |
| |
| bool | IsNearQ (const SUPER_t &q, float fDist=k_FLT_MIN2) const |
| |
| | cVecT4 () noexcept |
| |
| | cVecT4 (const SUPER_t &v) noexcept |
| |
| | cVecT4 (const float *pVals) noexcept |
| |
| | cVecT4 (float n0, float n1, float n2=0, float n3=0) noexcept |
| |
| | cVecT4 (const cVecT3< float > &v2, float _w=0) |
| |
| const float & | get_X () const noexcept |
| |
| const float & | get_Y () const noexcept |
| |
| const float & | get_Z () const noexcept |
| |
| const float & | get_W () const noexcept |
| |
| const cVecT3< float > & | get_V3 () const noexcept |
| |
| cVecT3< float > & | ref_V3 () noexcept |
| |
| void | InitCross (const THIS_t &v1, const THIS_t &v2, const THIS_t &v3) |
| |
| float * | get_T () noexcept |
| |
| const float * | get_CT () const noexcept |
| |
| const cVecT4< float > & | get_CR () const noexcept |
| |
| | operator const float * () const noexcept |
| |
| float | GetElem (int i) const noexcept |
| |
| float | operator[] (int i) const noexcept |
| |
| float & | operator[] (int i) |
| |
| bool | isZero () const noexcept |
| |
| COMPARE_t | Compare (const THIS_t &v2) const noexcept |
| |
| bool | operator== (const THIS_t &v2) const noexcept |
| |
| bool | operator!= (const THIS_t &v2) const noexcept |
| |
| bool | IsNear (const THIS_t &v2, float fDist=(float) k_FLT_MIN2) const |
| |
| float | get_MagnitudeSq () const noexcept |
| |
| float | get_Magnitude () const noexcept |
| |
| cVecT4< float > | operator- () const |
| |
| cVecT4< float > | operator- (const THIS_t &v2) const |
| |
| cVecT4< float > | get_Abs () const |
| |
| cVecT4< float > | GetSum (const THIS_t &v2) const |
| |
| cVecT4< float > | operator+ (const THIS_t &v2) const |
| |
| cVecT4< float > | GetDiff (const THIS_t &v2) const |
| |
| cVecT4< float > | GetScaled (float nScale) const |
| |
| cVecT4< float > | operator* (float nScale) const |
| |
| cVecT4< float > | operator/ (float nScale) const |
| |
| cVecT4< float > | GetMul (const THIS_t &v2) const |
| |
| cVecT4< float > | GetDiv (const THIS_t &v2) const |
| |
| float | GetDistSq (const THIS_t &v2) const |
| |
| float | GetDist (const THIS_t &v2) const |
| |
| float | GetDot (const THIS_t &v2) const |
| |
| cVecT4< float > | get_Normalized () const |
| |
| | operator float * () |
| |
| float & | RefElem (int i) noexcept |
| |
| void | Set (const THIS_t &v) |
| |
| void | SetZero () noexcept |
| |
| float | SetNormalized (void) noexcept |
| |
| bool | put_Magnitude (float nLength) |
| |
| void | SetLerp (const THIS_t &a, const THIS_t &b, DVALUE_t t) |
| |
| const cVecT4< float > & | operator+= (const THIS_t &v2) |
| |
| const cVecT4< float > & | operator+= (float n) |
| |
| const cVecT4< float > & | operator-= (const THIS_t &v2) noexcept |
| |
| const cVecT4< float > & | operator-= (float n) noexcept |
| |
| void | DoScale (float n) noexcept |
| |
| const cVecT4< float > & | operator*= (float nScale) noexcept |
| |
| cVecT4< float > & | operator*= (const THIS_t &v2) noexcept |
| |
| const cVecT4< float > & | operator/= (float nScale) |
| |
| cVecT4< float > & | operator/= (const THIS_t &v2) |
| |
| void | DoMul (const THIS_t &v2) noexcept |
| |
| void | DoDiv (const THIS_t &v2) |
| |
Angle of 3d orientation. Avoids Gimbel lock of pitch,bank/yaw,roll Euler angles for objects in motion. similar to float4 and D3DXQUATERNION Quaternions can be added to add angles.

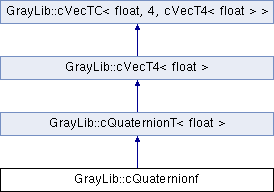
 Public Types inherited from GrayLib::cQuaternionT< float >
Public Types inherited from GrayLib::cQuaternionT< float >